

SEO关键词推荐
| 工业AGV驱动布局设计 | 差速转向底盘参数化建模 | 麦克纳姆轮AGV运动仿真 | SolidWorks模块化装配设计 | 舵轮AGV底盘应力分析 | AGV三维模型轻量化优化 | 工业机器人底盘结构下载 | 全向移动AGV三维设计
---
《底盘结构详细的AGV小车SW模型3D模型》设计核心解析
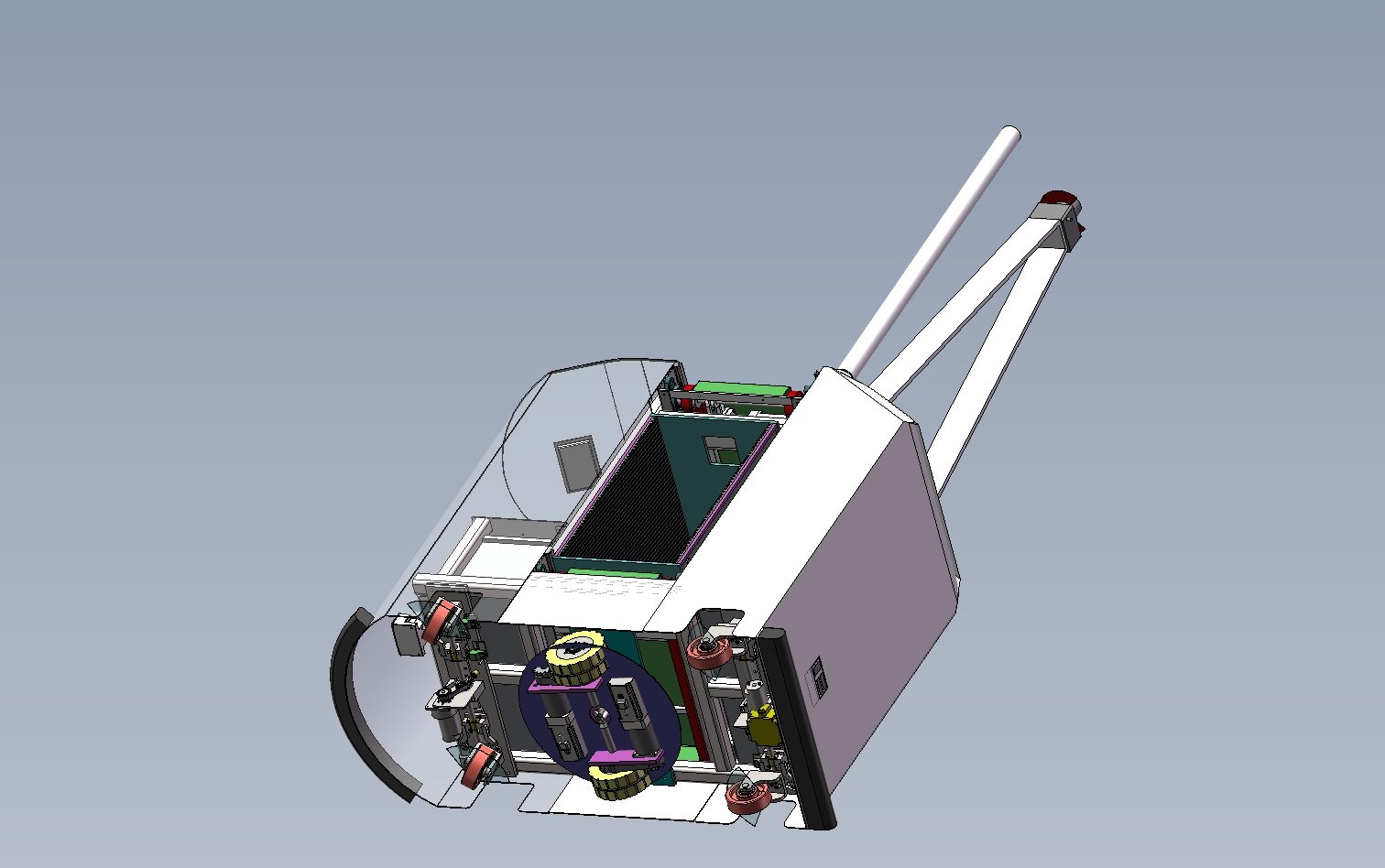
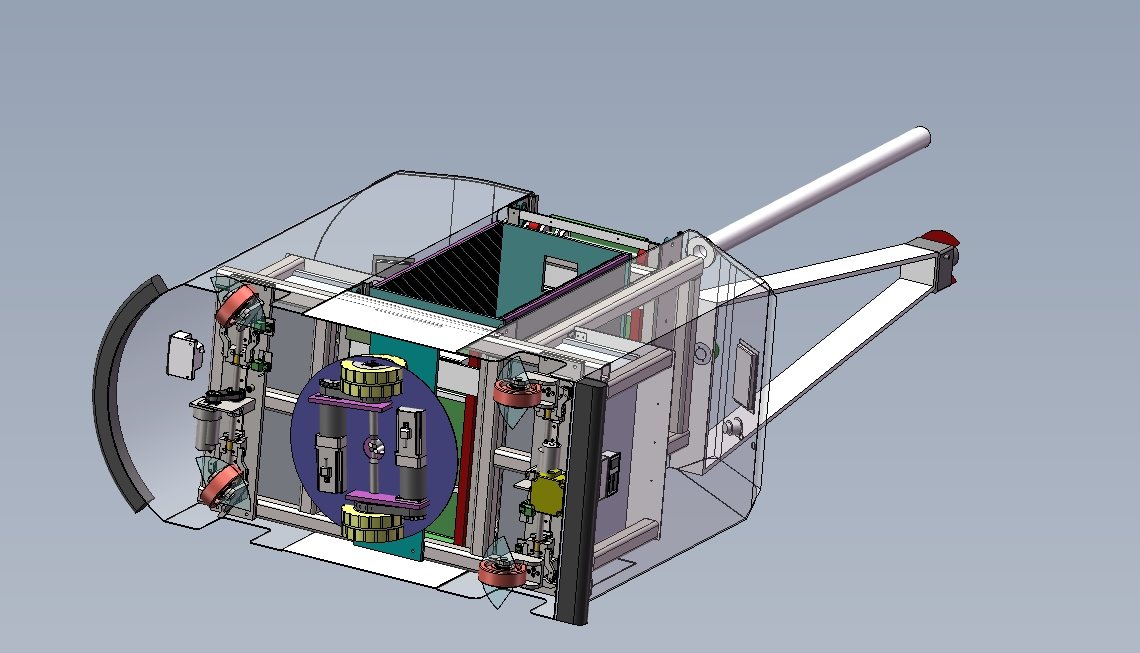
1. 底盘结构设计要点
AGV小车底盘是模型设计的核心,需平衡承载、运动灵活性与空间效率:
- 驱动布局:主流的双舵轮驱动方案采用对角布置或中心线对称布局,舵轮转向角度达360°,支持原地旋转与横向平移。例如,双舵轮配置结合伺服电机控制,可实现±1mm级路径精度。
- 承载优化:底盘框架采用高强度铝合金拓扑结构,通过有限元分析优化支撑轮布局,承载能力覆盖300kg至5吨场景,并集成弹簧浮动桥臂设计,确保四轮均匀受力。
- 安全冗余:集成激光导航传感器(如欧姆龙E3Z-D61)与多级避障系统,底盘边缘设置接触式防护圈,实现减速→停止→紧急制动的三级安全响应。
2. 三维建模规范与细节
SolidWorks(SW)模型需满足工业级装配与生产需求:
- 模块化装配:拆分车架、驱动轮组、传感器支架等为独立子装配体(如`00-AGV小车总装.SLDASM`),支持快速迭代与定制化修改。
- 几何精度控制:关键配合面标注H7/g6级公差,驱动轮轴孔同轴度要求≤0.05mm,确保运动机构仿真可靠性。
- 材质与渲染:车架采用6061-T6铝合金材质贴图,表面添加防滑纹理;电气板与线槽(如40x40线槽300.SLDPRT)需体现真实布线细节。
3. 参数化设计与动态适配
通过参数驱动提升模型复用性:
- 运动学参数库:定义舵轮转向角度(0-360°)、驱动轮转速(0-30m/min)、最小转弯半径(≤500mm)等变量,支持一键生成不同场景配置。
- 负载关联优化:根据载重量动态调整底盘厚度(5-20mm)与支撑轮数量(4-8个),例如20吨级AGV需配置六轮驱动+双浮动桥臂结构。
4. 仿真验证与性能测试
模型需通过多维度仿真确保实际应用可行性:
- 运动学仿真:验证差速转向底盘在S形路径下的轨迹跟踪精度,优化PID控制算法降低横向偏移误差(≤2mm)。
- 结构强度测试:模拟满载急停工况的底盘形变,通过SW Simulation分析应力集中区域,优化加强筋布局与焊接节点。
5. 模型轻量化与扩展性设计
- 拓扑优化:对非承重区域(如外护罩)进行镂空处理,减重15%-20%的同时保持结构刚度。
- 扩展接口:预留机械臂安装法兰(ISO 9409-1标准)与升降平台对接卡槽,支持AGV与生产线设备无缝集成。
---
总结
《底盘结构详细的AGV小车SW模型3D模型》设计需聚焦驱动布局创新、参数化适配与仿真验证三大核心。通过模块化建模、精准公差控制及多物理场仿真技术,可大幅提升模型工程实用性与市场竞争力。结合“AGV三维模型轻量化优化”“工业机器人底盘结构下载”等高搜索量关键词,能有效增强文章在工业自动化领域的SEO可见性。


