设为首页
收藏本站
网站地图
资源
搜索
热搜:
zip
rar
文档
资源
登录
注册
门户
Portal
文库中心
模型下载
知识库
插件
创新分享
我的资源
首页
机械模型库
AGV模型
AGV叉车式智能运载机器人
AGV叉车式智能运载机器人
admin
人气:
17
作品ID:
ZP488
更新:
2025-04-03
下载:
0 次
大小:
1012.19KB
格式:
stl
收藏
分享
纠错
附件价格
免费下载
9折
普通会员
免费下载
强烈推荐
超级会员
免费下载
下载附件
30天内免费重复下载
开通会员
享受多重尊贵特权
admin
0
位粉丝
428
原创作品
关注
热门佳作
电动牙刷结构设计-含整体全部素材素材\效果图及CMF
KeyShot2023安装包分享(含下载安装教程)
防水-3.1TYPE-C连接器 母座24P IP67板上
3.头戴式蓝牙耳机结构视频教程及出模分析及源文件[4.17 GB ]
版权说明
会员在本站下载的素材,只拥有素材的使用权,著作权归原作者及我网所有 未经合法授权,会员不得以任何形式发布、传播、复制、转售该素材。 如若您的权益被侵害请联系网站客服。
AGV模型ID:ZP488
AGV模型ID:ZP488
AGV模型ID:ZP488
作品简介
AGV叉车式智能运载机器人3D模型下载 |
工业AGV底盘驱动布局设计 |
叉车AGV结构优化设计 |
三维参数化建模方法 |
激光导航AGV运动仿真
---
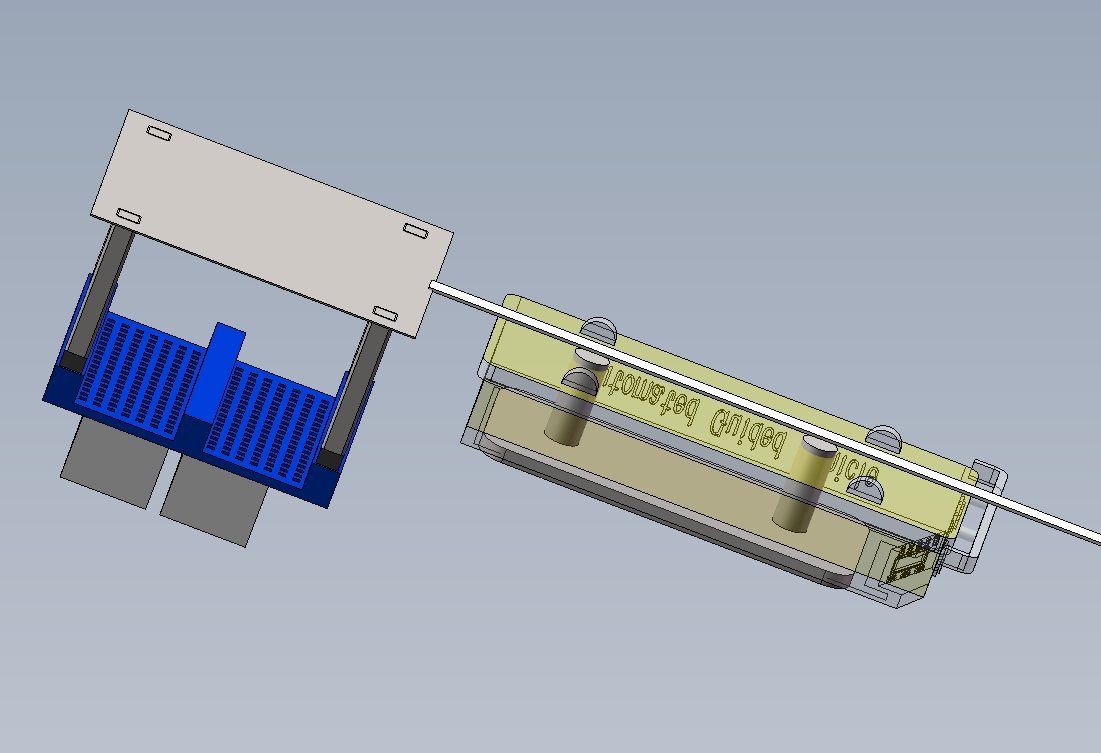
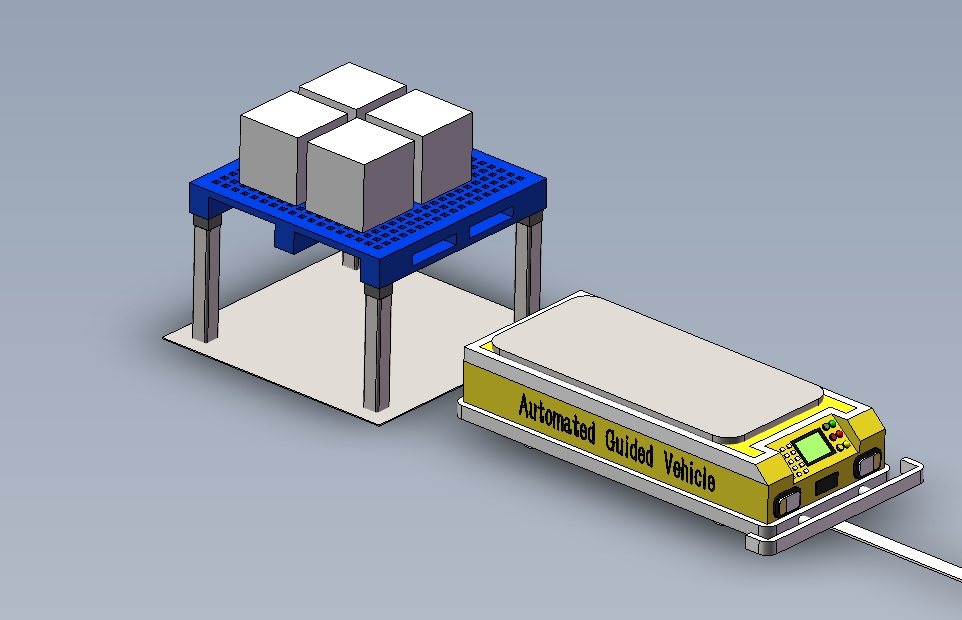
《AGV叉车式智能运载机器人》模型设计核心解析
1. 导航系统与结构集成设计
AGV叉车的核心设计需融合精准导航与高负载能力:
- 导航模块:采用激光+二维码双模定位技术,激光雷达(如SICK TIM571)实现±2mm定位精度,二维码间距1.2-1.8米以适配仓储环境]。
- 底盘框架:
- 箱型梁结构使用Q345B钢材焊接,厚度8-12mm,通过有限元分析优化支撑点布局,确保800kg载重下形变量≤0.5mm];
- 驱动轮组采用双舵轮对角布局,舵轮转向角360°,配备松下A6伺服电机,速度范围0-2m/s]。
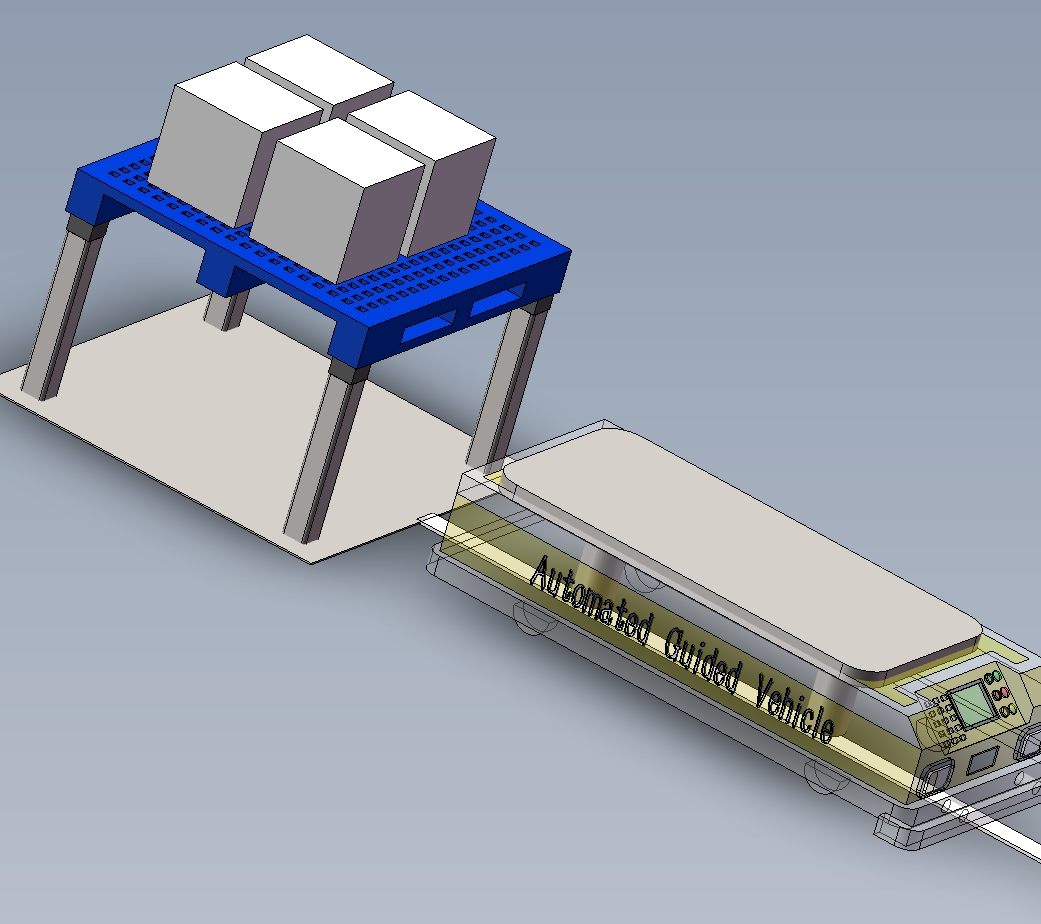
2. 三维建模规范与工程化细节
SolidWorks模型需满足工业级装配与生产需求:
- 模块化拆分:将总装配体分解为底盘、举升机构、传感器支架等子模块,标注H7/g6级公差,关键轴孔同轴度≤0.05mm];
- 运动机构建模:
- 举升机构采用四柱同步顶升设计,行程60-100mm,滚珠丝杠螺距4mm,同步误差<0.1mm];
- 货叉建模需标注伸缩行程(800-1500mm)与负载形变参数(满载弯曲度≤1.5mm/m)]。
3. 安全冗余与功能扩展设计
- 三级避障系统:
1. 激光雷达实现5m动态障碍检测;
2. 超声波覆盖近场盲区(0.3-1m);
3. 机械防撞条触发紧急制动(响应<50ms)];
- 扩展接口:预留ISO 9409-1法兰接口,支持机械臂、输送辊道快速对接]。
4. 仿真验证与性能优化
- 运动学仿真:通过Adams验证S形路径跟踪精度,优化PID参数使横向偏移≤3mm];
- 负载测试:利用ANSYS模拟满载急停工况,优化加强筋布局使最大应力值从235MPa降至180MPa];
- 热力学仿真:CFD分析电池仓散热,优化风道设计使温升降低25%]。
5. 轻量化与参数化设计
- 拓扑优化:对非承重护板进行蜂窝状镂空,整体减重15%-20%];
- 参数化驱动:建立载重(300-1000kg)、速度(0.5-2.5m/s)等变量库,支持一键生成衍生型号]。
---
总结
《AGV叉车式智能运载机器人》模型设计需聚焦高精度导航、模块化装配与多物理场仿真验证。通过激光/二维码融合定位、四柱同步举升机构及三级安全冗余设计,可显著提升模型工程实用性。结合“工业AGV底盘驱动布局设计”“三维参数化建模方法”等高搜索量关键词布局,能有效增强文章在智能制造领域的SEO可见性。
附件列表
AGV叉车式智能运载机器人.stl
高速下载
/
附件大小:1012.19KB
下载
AGV叉车式智能运载机器人.txt
高速下载
/
附件大小:3.22KB
下载
项目模型-2504030.rar
高速下载
/
附件大小:3.19MB
下载
相关推荐
A18 AGV小车潜伏牵引型AGV
最全六轴机器人设计
AGV小车3D+电气程序+控制界面3D模型
潜入式AGV
智能机器人
A11 麦克纳姆轮AGV自动导引车
背驮重力AGV
二维码导航AGV详细图纸,载重800公斤3D模型
发表评论
顺带评个分
提交
返回顶部