
SEO关键词推荐
背驮式AGV运载机器人3D模型 | 工业机器人三维建模 | AGV结构优化设计 | 机器人运动仿真技术 | SolidWorks模型参数化 | STEP格式机器人模型 | 自动化搬运设备建模 | 三维参数化设计方法 | AGV底盘驱动布局 | 工业机器人模型下载
---
背驮式AGV运载机器人3D模型设计核心知识点
1. 结构设计要点
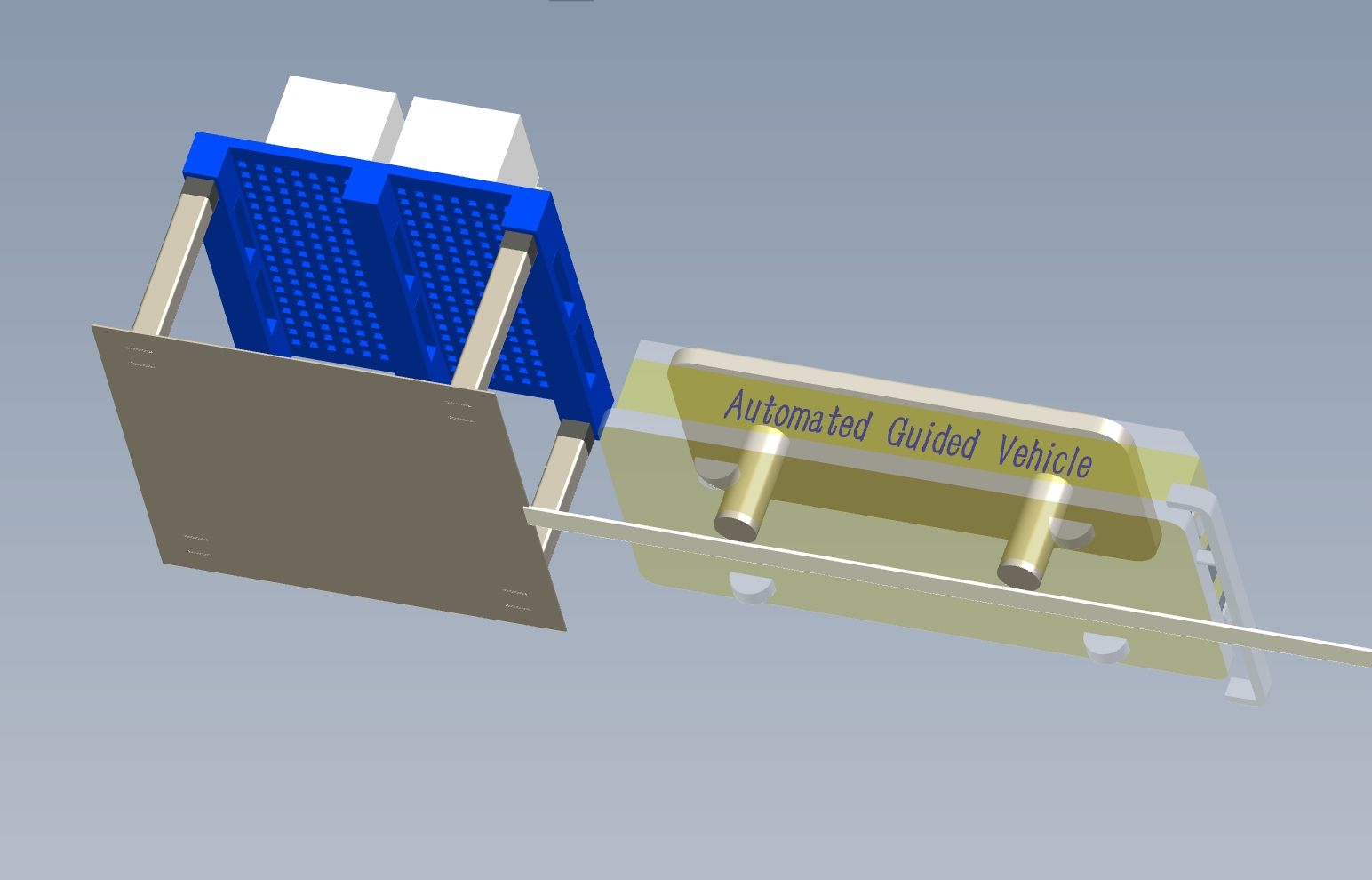
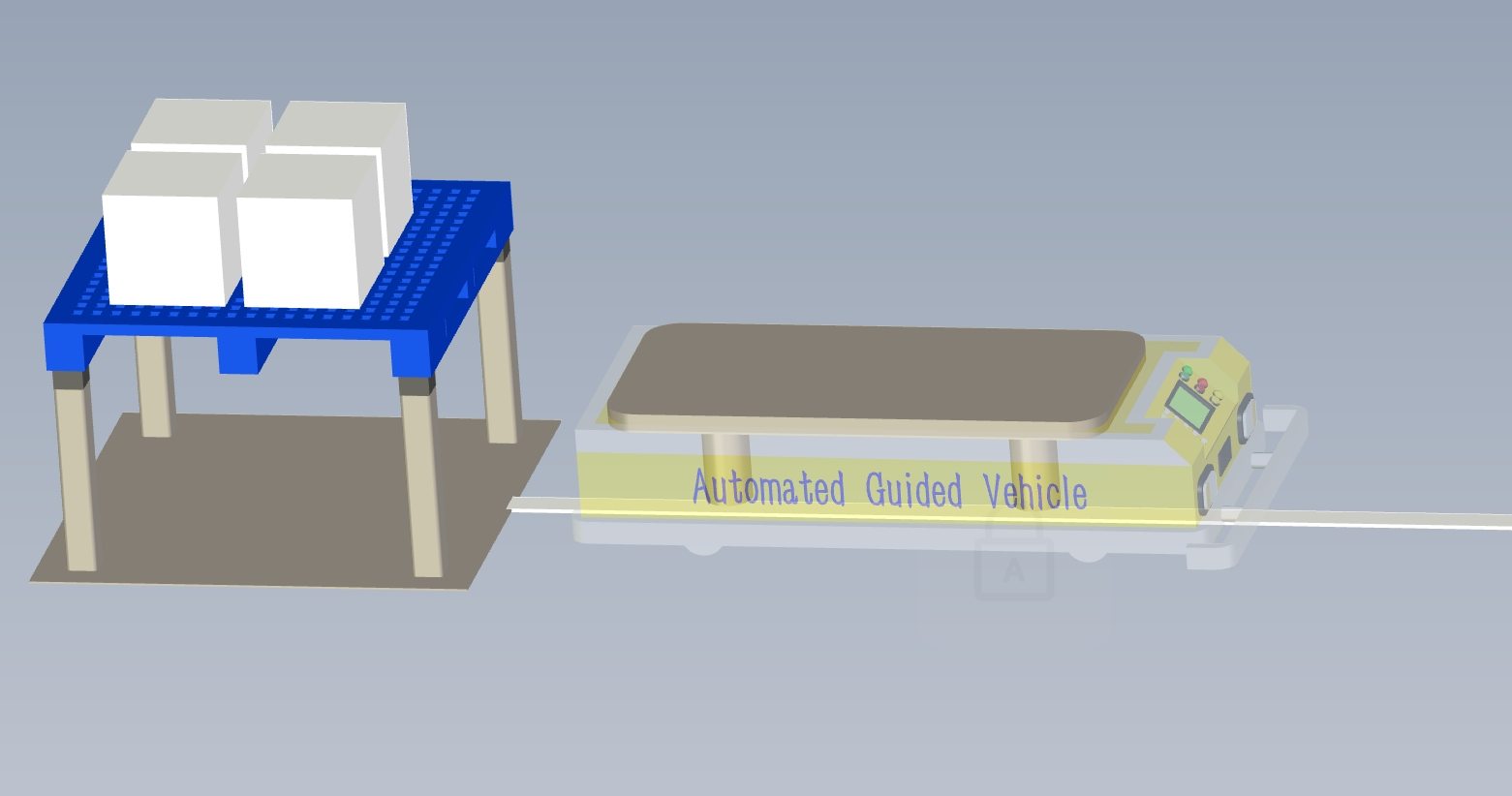
背驮式AGV运载机器人的核心设计需兼顾功能性、稳定性和空间利用率。其典型结构包括:
- 车体底盘:采用单舵轮驱动+多从动轮支撑的布局,确保高承载与灵活转向能力,例如双编码器定位结合磁栅尺辅助定位技术,可提升导航精度至±5mm。
- 负载机构:背部承载设计需考虑重心分布与隔层牵引结构,支持300kg至60吨的负载需求,并通过模块化组件(如可伸缩牵引杆)适配不同物料尺寸。
- 安全冗余:集成激光保护装置、接触式防护圈及超声波避障系统,实现三级避撞策略(减速→停止→物理碰撞保护)。
2. 三维建模规范
模型需符合工业级精度与实用性要求:
- 几何精度:关键部件(如驱动轮、支撑轮)需标注公差范围(如±0.1mm),确保运动机构仿真结果的可靠性。
- 材质与渲染:车体采用轻量化合金材质,表面纹理需体现防滑与耐磨特性,增强模型可视化效果。
- 格式兼容性:推荐导出为STEP或STP格式,支持SolidWorks、AutoCAD等主流软件二次编辑,满足企业定制化需求。
3. 参数化设计方法
通过参数驱动提升模型复用性:
- 运动学参数:定义舵轮转向角度(0-360°)、驱动轮转速(0-32m/min)与爬坡角度(≥6°)等变量,支持快速适配不同场景。
- 负载关联设计:根据载重量(如300kg或20吨)动态调整底盘厚度、支撑轮数量及驱动电机功率,实现模型库分级管理。
4. 仿真验证流程
模型需通过多维度仿真确保实际应用可行性:
- 运动学仿真:验证AGV在S形、L形路径下的轨迹精度及原地回转性能,优化差速转向算法。
- 负载测试:模拟满载条件下的车体形变与应力分布,优化支撑轮布局与材质强度。
5. 模型优化策略
- 轻量化设计:通过拓扑优化减少非承重区域材料,降低能耗并提升运行效率。
- 模块化接口:预留机械臂、升降平台等扩展接口,支持AGV与生产线设备的无缝对接。
---
总结
背驮式AGV运载机器人3D模型设计需以功能实现为核心,融合结构优化、参数化建模与仿真验证技术,同时兼顾工业标准与用户定制需求。通过精准的关键词布局(如“AGV三维参数化设计”“工业机器人模型下载”)和结构化内容呈现,可显著提升文章在搜索引擎中的可见性与专业性。


