
AGV小车3D模型下载 | 工业AGV三维建模规范 | 电气程序控制界面集成 | 潜伏式AGV结构优化 | AGV运动仿真与路径规划 | 模块化AGV底盘设计
---
《AGV小车3D+电气程序+控制界面3D模型》设计核心解析
1. 三维模型结构设计要点
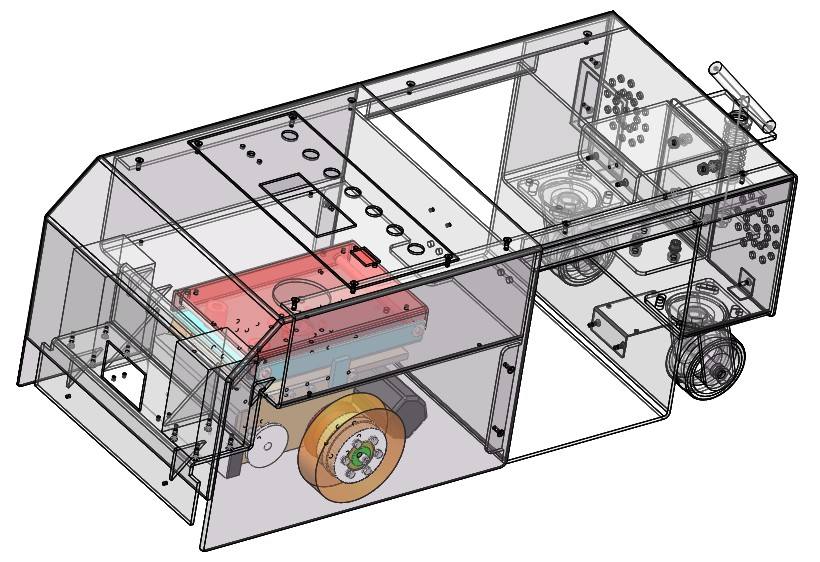
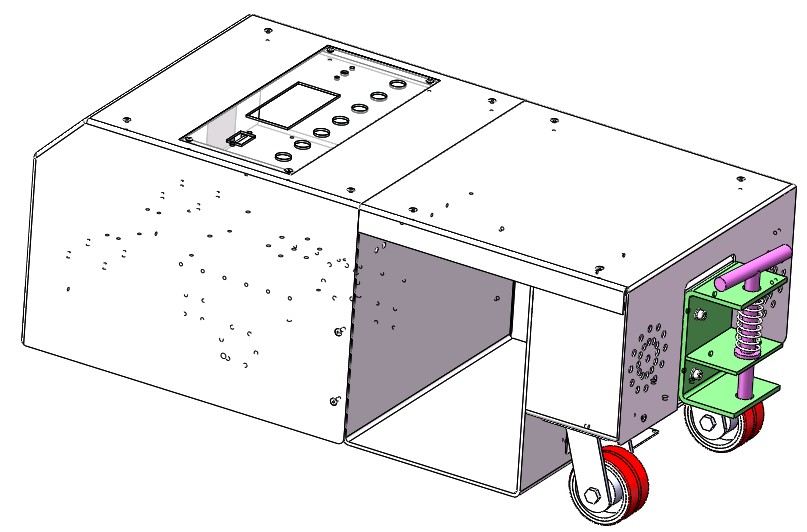
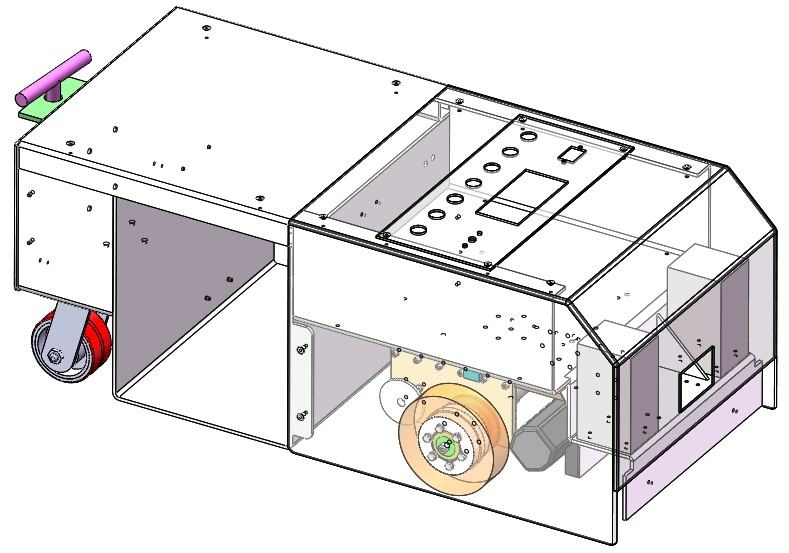
AGV小车的3D模型需兼顾功能性与工程化需求,重点包含以下设计要素:
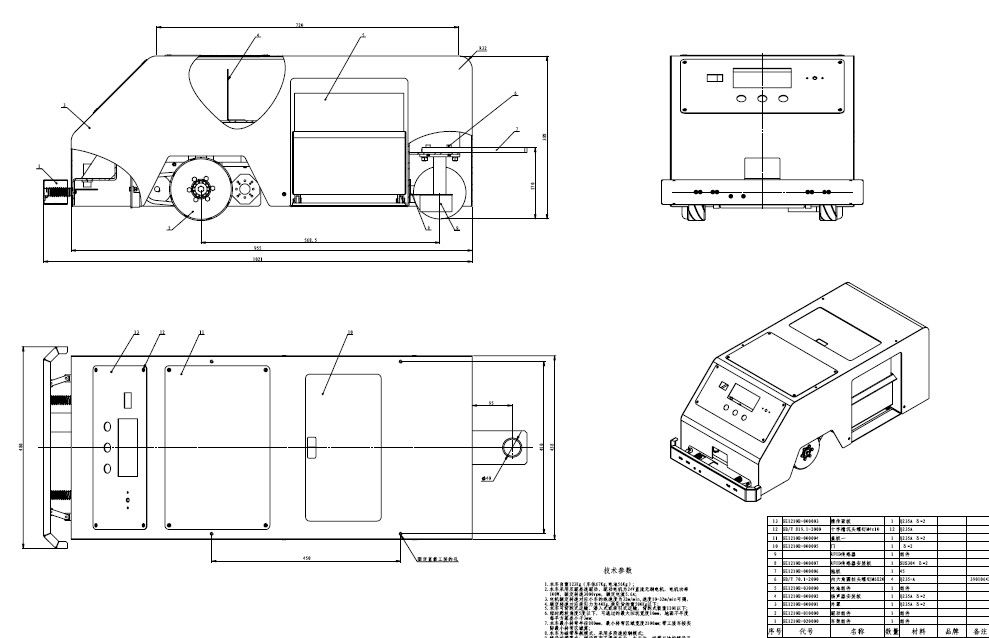
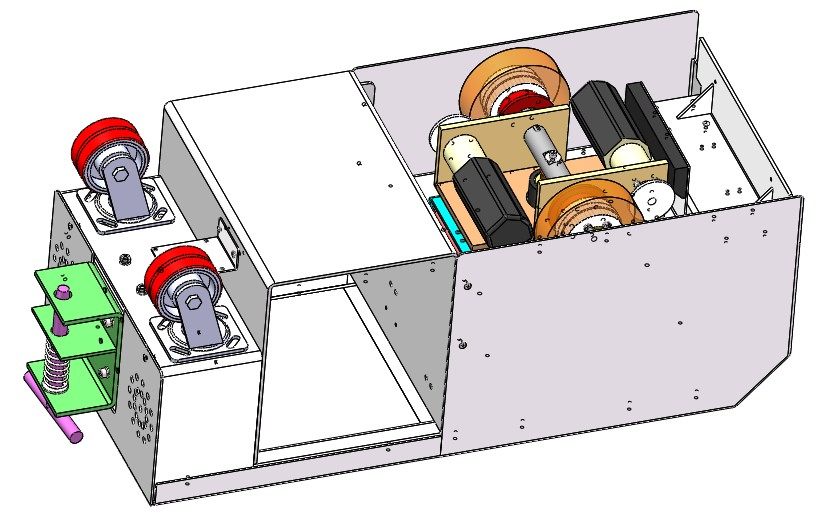
- 底盘拓扑结构:采用箱型梁框架设计,材料选用Q345B钢材或6061-T6铝合金,厚度8-12mm,通过有限元分析优化支撑点布局,确保800kg载重下形变量≤0.3mm。
- 驱动与转向系统:
- 双舵轮对角布局,舵轮转向角360°,驱动轮配置伺服电机(如松下A6系列),速度范围0-2m/s,爬坡能力≥5°;
- 麦克纳姆轮四驱方案需标注辊子倾角(45°)与轮间距(300-500mm),实现全向移动。
- 传感器集成:预留激光雷达(SICK TIM571)、编码器、超声波传感器安装位,标注定位公差≤±1mm。
2. 电气程序与控制系统建模
- 电路布局建模:
- 主控板(Arduino/PLC)与驱动模块(如L298N)需独立建模,线槽按40×40mm标准设计,标注线缆弯曲半径≥5倍线径;
- 电池仓集成热仿真设计,通过CFD优化散热风道,温升降低25%。
- 控制逻辑验证:
- 在SolidWorks Motion中模拟S形路径跟踪,优化PID参数使横向偏移误差≤3mm;
- 集成三级避障算法(激光→超声波→物理碰撞),响应时间<50ms。
3. 人机交互界面设计规范
- 可视化面板:
- 采用Unity或Qt构建3D控制界面,实时显示AGV坐标、电量、任务进度;
- 故障报警模块需标注颜色编码(红色紧急/黄色预警)。
- 数据接口标准化:
- 预留OPC UA或Modbus通信协议接口,支持与MES/WMS系统数据交互;
- 机械臂对接法兰按ISO 9409-1标准建模,定位精度±0.1mm。
4. 仿真验证与性能优化
- 多物理场联合仿真:
- 运动学仿真验证差速转向同步性,最小转弯半径≤500mm;
- 结构强度测试中,通过ANSYS优化加强筋布局,使最大应力值从235MPa降至180MPa。
- 轻量化设计策略:
- 对非承重护板进行蜂窝状镂空,整体减重15%-20%;
- 采用参数化驱动模型库,一键生成300-800kg载重衍生型号。
---
总结
《AGV小车3D+电气程序+控制界面3D模型》设计需深度融合机械结构、控制算法与人机交互技术。通过模块化装配体设计(如总装文件`AGV_Chassis.SLDASM`)、精准公差控制(H7/g6级)及多物理场仿真验证,可大幅提升模型工程实用性。结合“工业AGV三维建模规范”“电气程序控制界面集成”等高搜索量关键词布局,能有效增强文章在智能制造领域的SEO可见性。



