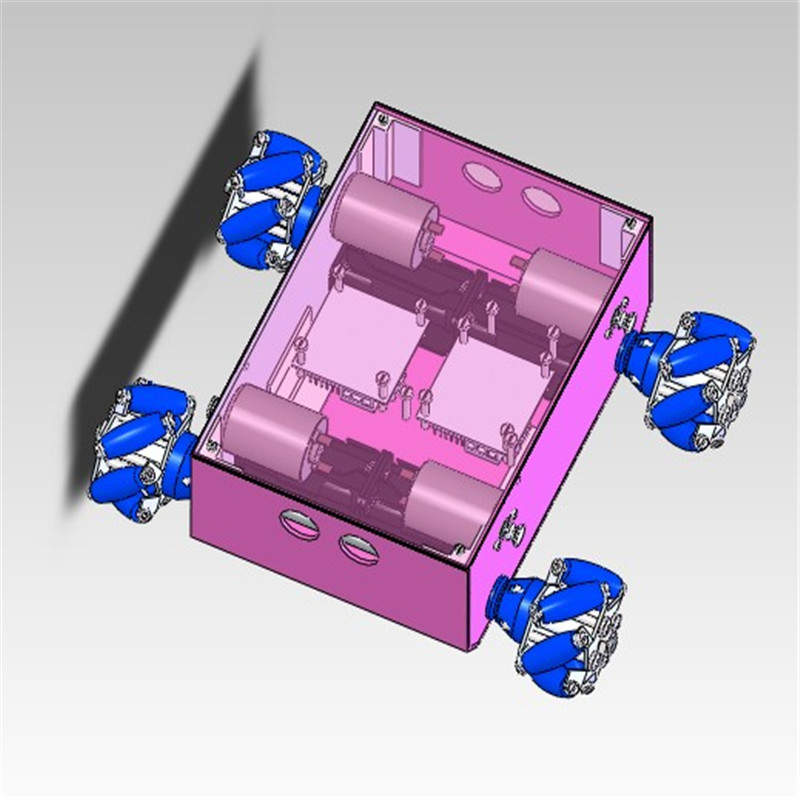
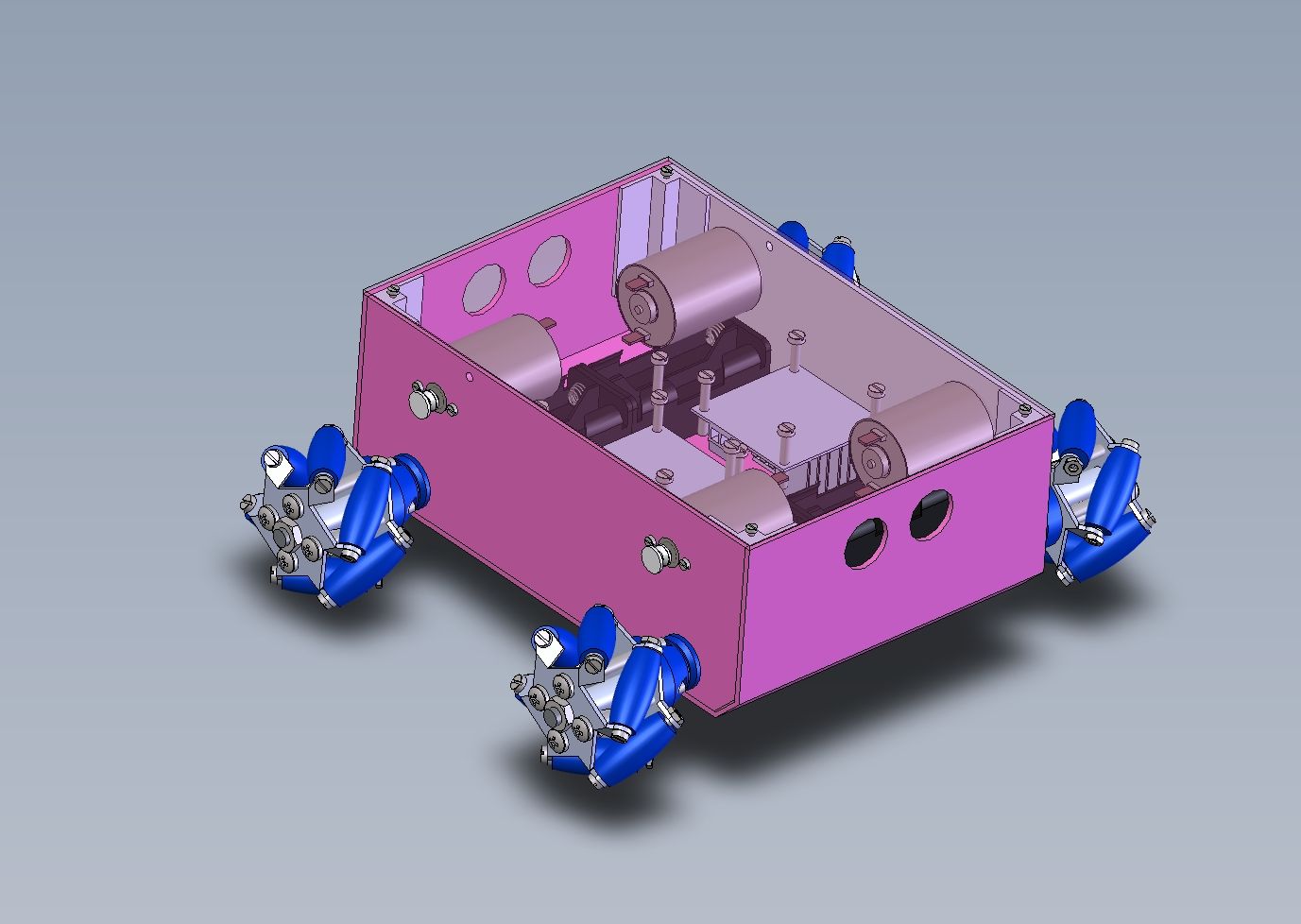
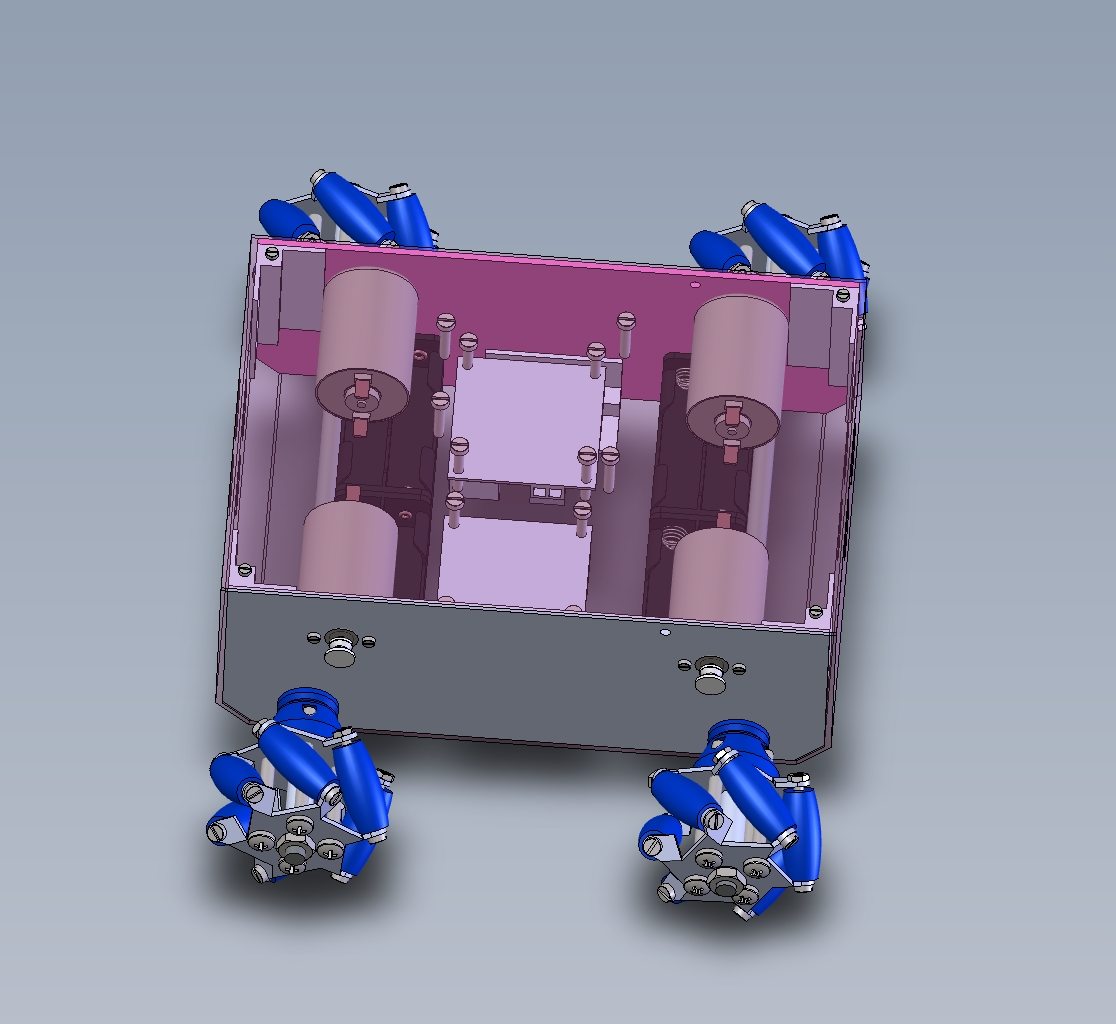
# A1麦克纳姆轮(全向轮)四驱AGV小车底盘设计标准与细节探析
在自动化物流与智能移动领域,A1麦克纳姆轮(全向轮)四驱AGV小车底盘无疑是关键组件。它如灵动的舞者,在各类场景中灵活穿梭,实现精准的位置移动与任务执行。
## 设计标准
### 结构强度方面
其底盘需具备卓越的结构强度,以承受负载及复杂工况下的应力。材料的选用至关重要,需精心挑选强度高、韧性佳的金属合金,如航空级铝合金等。如此,在承载重物时,方能稳如磐石,避免因结构变形而影响小车性能。
结构强度
### 精度要求
精准度是AGV小车底盘的核心要素之一。轮距、轴距等尺寸需严格把控,误差范围应控制在极小区间内。每一个毫米的偏差,都可能对小车的运动轨迹产生显著影响,进而影响其作业效率与准确性。 精度要求
## 设计原则
### 稳定性原则
底盘设计应确保小车在运行过程中的稳定性,尤其在高速行驶或重载情况下。合理的重心布局犹如天平的平衡,关乎小车的平稳性与可靠性。通过科学的力学分析,将重心集中于底盘中心区域,可有效降低侧翻风险。 稳定性原则
### 灵活性原则
麦克纳姆轮赋予了小车全向移动的能力,但要实现灵活的转向与移动,底盘的悬挂系统及驱动机构需紧密配合。悬挂系统需具备良好的弹性与减震性能,使小车在复杂地面上也能如履平地,实现快速且精准的转向。 灵活性原则
## 相关设计细节
### 电机选型
四驱系统的电机功率与扭矩选择,需依据小车负载及运行场景来定。不同的负载需求,电机的参数差异显著。高负载场景下,大功率电机是保障动力输出的关键;而在轻载或高精度作业时,小型高效电机则更为合适。 电机选型
### 控制系统集成
底盘的控制系统是其“大脑”,要实现精确的运动控制,需将传感器数据与驱动指令高效整合。传感器如编码器、陀螺仪等,实时反馈小车的位置与姿态信息,控制系统据此精准调整电机转速与转向角度。 控制系统集成
在A1麦克纳姆轮(全向轮)四驱AGV小车底盘的设计征程中,每一个细节都如同拼图的关键块,共同铸就其卓越性能。只有全面考量各项标准与原则,才能打造出高性能、可靠的AGV小车底盘,在智能物流等领域发挥关键作用。